 こんにちは。第一技術部システム設計課の熊谷です。
こんにちは。第一技術部システム設計課の熊谷です。
前回のブログでは屋外でのRTK-GNSS(Real Time Kinematic- Global Navigation Satellite System)受信機を用いたcm級高精度測位についてのお話をさせていただきました。
何年か前の日曜TVドラマでもトラクターの自動運転が出てきましたが、農機や重機などの屋外測位だけではなく、倉庫内や工場内でのフォークリフトやAGV(Automatic Guided Vehicle:無人搬送車)などの位置検出も作業効率改善のため、ニーズが高まっています。
このような屋内測位についても、色々な手法を用いて取り組んでいますが、その中でもAR(Augmented Reality:拡張現実)という画像技術があります。
AR?と言われてもピンと来ないと思いますが、スマホの専用のアプリを使ってカメラで映すと、色々な画像が立体で表示されるものです。2016年にリリースされた某人気ゲームの「〇〇 GO」でもキャラクターが立体画像として表示されるのは、この技術を使ったものでした。
AR機能では、画像認識処理を用いて、登録済図形(ARマーカ)の4辺の画素数から図形に対するカメラ位置の相対距離X,Y、Z軸を、ARマーカの4辺の長さの比率からカメラ位置の相対角度を、それぞれ演算することができます。
これらのARマーカをあるエリア内に複数用意することで、そのエリア内におけるカメラの相対位置を検出することが可能となります。
高画質(4K相当)のカメラを使うと、2mの距離から±2cm程度の精度でARマーカの相対位置を検出することができます。
だいたいの位置が分かれば良いとなれば、もっと安価なカメラを用いてARマーカを検出することもできます。
表1は、25cm□のARマーカから2m離れた位置でX軸、Y軸の距離を静的に測定した結果です。
ここではY軸がARマーカまでの距離となりますが、広角レンズの歪みで画角の端では誤差が出ています。
表 1 距離測定結果


図 1 距離測定実験の様子
例えば、このようなARマーカを工場や倉庫などの柱や壁に複数台貼り付けて、フォークリフトにカメラを取り付けることで、フォークリフトの相対位置を精度よく検出することができるのです。
また、これとは逆にカメラを天井に固定して移動体や荷物の上にARマーカを取り付けることで、荷物やフォークリフト、AGVなどの位置管理を無人で行うことができます。
このようなシステムを導入しておけば、倉庫の中の必要な荷物の位置は〇〇さんに聞かないと分からない・・などの問題が解決できますし、倉庫のどこにどの荷物を置いたかを人がいちいち記録しなくても、管理システムで必要な部品を呼び出せば、その部品が倉庫のどこにあるのか一瞬で判明して作業の効率化に大きく貢献できます!
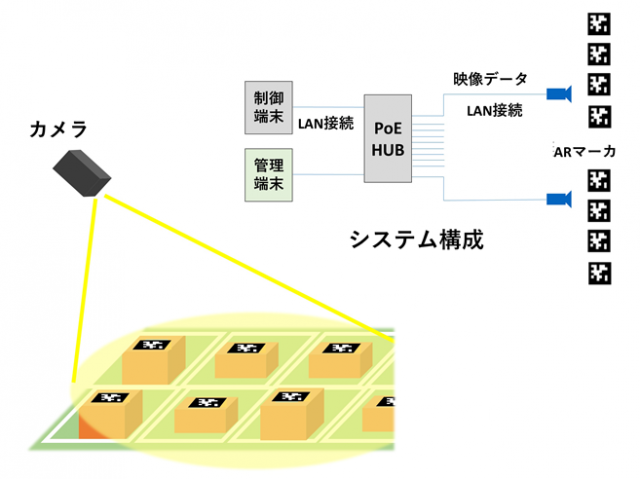
図 2 倉庫の在庫管理イメージ
WTIではこのような画像認識を用いた位置検知システムの開発も行っております。
重機、農機などの高精度測位システム+自律航法システムやフォークリフト等の屋内測位システムの開発 など位置測位や画像認識を用いたシステムなど、こんなことできるかな?とお考えの際にはお気軽にご相談ください。
【関連リンク】
- 「国際物流総合展2021 in 愛知」へ出展します
- 屋内で数cm以内の位置精度を実現! ~電波を使わない、新しい位置測位のカタチ~(特許出願中)
- テレビ番組にも登場した、自動運転・自動搬送に不可欠の「自律航法」技術のデモ動画です
- RTK-GNSS受信機による位置検出精度は?
- GPSの位置精度をご存知ですか?
- 「自動運転」、「IoT」の盛り上がりが嬉しい
【関連ブログ】
- 「脱炭素物流」でカギとなる移動体の位置検知。測距レーザーの裏技活用術!
- 屋内位置検知はセンシング技術がポイント。ミリ波レーダーで移動量を検出しよう!
- AGVとは? ~工場、倉庫、農業、建設分野などの人手不足への救世主はAGV~
- 物流を担う人手不足の解決方法は「自動化」。ドローンによる輸送実験も進展中
- 本日、プレスリリース! ~AR活用による工事不要、低コストのAGV屋内自動走行~
- 日刊工業新聞に当社の測位技術の紹介記事が載りました ~屋内自動走行のための高精度測位技術~
- テクノシェルパが提供する位置情報検出技術とは
【YouTube】
WTIメールマガジンの配信(無料)
WTIエンジニアが携わる技術内容や日々の業務に関わる情報などを毎週お届けしているブログ記事は、メールマガジンでも購読できます。ブログのサンプル記事はこちら
WTIメールマガジンの登録・メールアドレス変更・配信停止はこちら
WTIの技術、設備、設計/開発会社の使い方、採用関連など、幅広い内容を動画で解説しています。